Constrained Dynamic Deployment of Sensor Networks
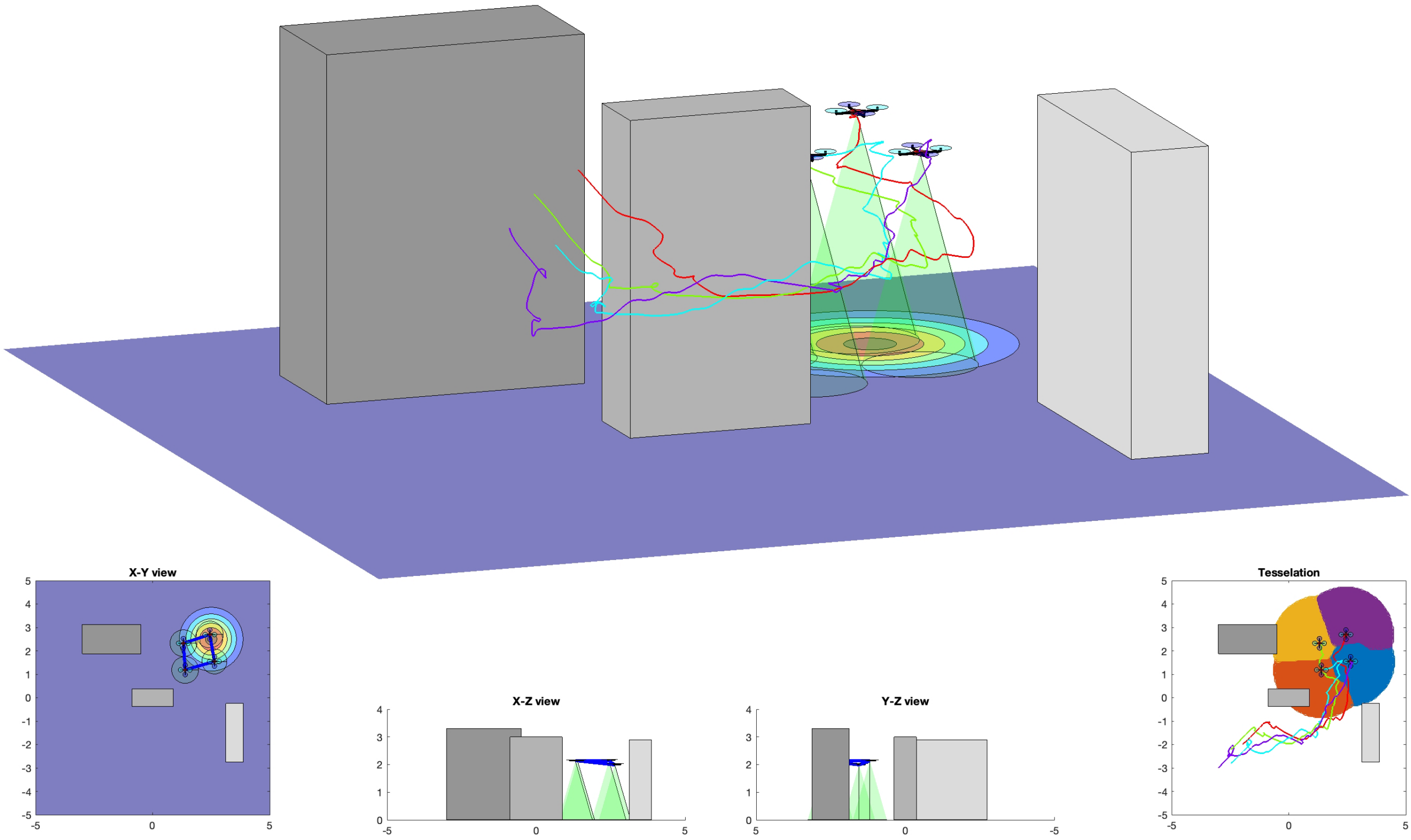
This study focuses on developing a framework for constrained optimization of dynamic robot deployment. We have identified various realistic robot deployment constraints, including but not limited to energy constraints, connectivity constraints, collision constraints, obstacle constraints, regulatory constraints, and maneuverability constraints. Our framework utilizes Bézier curves to model robot trajectories. Bézier curves are parametric curves that define robot trajectories with their parameters. They facilitate the prediction of robot states over a time horizon by sampling the curves as inputs to the robot’s dynamics. Additionaly, constraints can be imposed directly on the curve geometry, embedding them into the curve formulation. This framework is proposed in “A Framework for Constrained Deployment Optimization of Wireless Mobile Sensor Networks”. This web application demonstrates the embedded formulation. We also extended this framwork and proposed DisCo-Guide algorithm. This algorithm is decentralized and optimizes the sensing performance of drone swarms. The algorithm utilizes Gradient Ascent method to search and find the optimal deployment. DisCo-Guide decides on the drone trajtories under realistic constraints and renders the drone dynamics to avoid unsafe manouvers. This video presents some concepts used in this study. This video presents evaluation on additional test cases . The results of the study are under review for publication. The relevant code is available per request at Github.