Constrained Dynamic Deployment of Sensor Networks
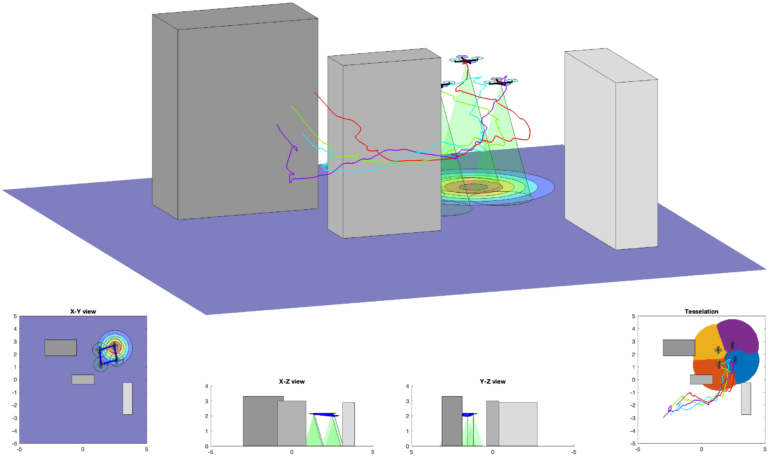
This study focuses on developing a framework for constrained optimization of dynamic robot deployment. We have identified various realistic robot deployment constraints, including but not limited to energy constraints, connectivity constraints, collision constraints, obstacle constraints, regulatory constraints, and maneuverability constraints. Our framework utilizes Bézier curves to model robot trajectories. Bézier curves are parametric curves that…